
Rolf's Personal Playground
Jetson AI Fundamentals (Dana Sheahen)
2021-03-20, Material of Dana Sheahen
https://courses.nvidia.com/courses/course-v1:DLI+S-RX-02+V2/info
- Install JetPack 4.5.1 on SD card
- Get the right Docker container. The list of different software combinations can be found here:
https://ngc.nvidia.com/catalog/containers/nvidia:dli:dli-nano-ai
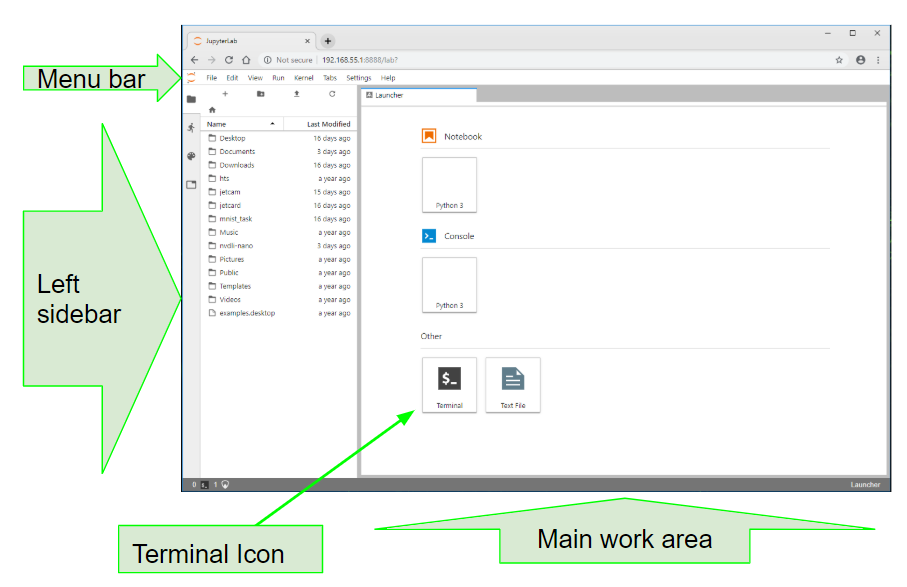
Fig.: JupyterLab Interface. Source: NVIDIA Course Getting Started with AI on Jetson Nano, Dana Sheahen
Get / run Docker Image
USB Cam Version
sudo docker run --runtime nvidia -it --rm --network host \
--volume ~/nvdli-data:/nvdli-nano/data \
--device /dev/video0 \
nvcr.io/nvidia/dli/dli-nano-ai:v2.0.1-r32.5.0
# PW: dlinano
CSI Cam Version
# Two CSI cams version! video0, video1
sudo docker run --runtime nvidia -it --rm --network host \
--volume ~/nvdli-data:/nvdli-nano/data \
--volume /tmp/argus_socket:/tmp/argus_socket \
--device /dev/video0 \
--device /dev/video1 \
nvcr.io/nvidia/dli/dli-nano-ai:v2.0.1-r32.5.0
# PW: dlinano
Change Keyboard Configuration on Console. Important!
Before you change the boot target (aka runlevel) to multi-user.target, i.e. without GUI, you should change the keyboard configuration first in case you are not using an English keyboard layout. A wrong keyboard layout can cause a lot of trouble. It can even prevent you from logging in when your password is using characters affected by the layout configuration.
Open a terminal window and execute sudo dpkg-reconfigure keyboard-configuration.
Test it on a tty terminal, too, because that is what you get if you change the runlevel to other than graphical.
Press <crtl> + <alt> + '1' to get to a tty terminal. Test your credentials. A wrong keyboard layout may compromise your password typing.
Change target / runlevel
systemctl get-default # change target of current session systemctl isolate multi-user.target # systemctl isolate graphical.target # Use this to get back to graphical mode # set default target systemctl set-default multi-user.target # systemctl set-default graphical.target # Use this to get back to graphical mode
Kitchen Experiments (2021-01-27)
Running the 'Hello AI World' Examples (Repo jetson-inference)
Software by Dustin Franklin, NVIDIA: https://github.com/dusty-nv/jetson-inference
For his examples I am using Jetpack 4.5
Start Docker Container
Input Streams are listed here:
* Video Streaming, camera settings, devices, input streams
The cameras must be connected before starting the docker container. The docker image detects the connected cams during the start phase.
cd jetson-inference docker/run
It starts the docker container as an interactive session.
First camera test: video-viewer
Inside the running docker container instance the application video-viewer can be executed on the command line. It connects to the camera device defined in the first command line argument and opens a view port (window) to show the camera stream.
# My Jetson Nano 4BG B01 kit has two cams connected via flex flat band cable (ffc) video-viewer csi://0 video-viewer csi://1 video-viewer csi://0 & video-viewer csi://1 # External USB cam is enumerated as video2 video-viewer v4l2:///dev/video2
Object Detection
python3 my-detection_video2.py


Semantic Segmentation
segnet --network=fcn-resnet18-mhp /dev/video2
Headless with Xfce4
Alternative to remote desktop! Usually remote desktop clients require a full desktop environment including connected monitor(!) which can be controlled remotely. I don't like it!
Let's go for some terminal based X11 solution!
- Save 1GB of Memory! Use LXDE on your Jetson, by Jim from JetsonHacks
TTY Console Keyboard
Press <alt>-<ctrl> F2 get a tty terminal. You may have to press <enter> to activate the screen.
login.
Then call localectl to list all locale tettings. In order to change the keyboard to German execute:
locale set-keymap de
When you login the next time the keyboard map is changed. Check it again with localectl.
VC Keymap: de should be set now.
Change the Desktop Environment
sudo -i service --status-all dpkg-reconfigure lightdm # dpkg-reconfigure gdm3
Jetson Nano B01 - Dual RPi Cameras + how to get faster frame rates
Dual Cam Multi-Threading, Haar Face Detector
Headless
https://www.digitalocean.com/community/tutorials/how-to-install-and-configure-vnc-on-ubuntu-18-04
https://www.tightvnc.com/download.php
https://freundschafter.com/research/how-to-install-xfce-and-vnc-on-a-headless-ubuntu-18-04/
Old
CompuLab Display Emulator (fit-Headless)
This emulator appears to the Jetson to be a HDMI monitor. X11 and the desktop
Allow X without HDMI at Boot:
Edit /etc/X11/xorg.conf Section "Device" ... ... Option "AllowEmptyInitialConfiguration" "true" EndSection
Which will allow X11 to startup without a monitor attached.
Source: https://www.jetsonhacks.com/2016/05/03/jetson-allow-graphics-without-hdmi/
Boot Targets aka Runlevel
Source: https://www.tecmint.com/change-runlevels-targets-in-systemd/
- Run level 0 is matched by poweroff.target (and runlevel0.target is a symbolic link to poweroff.target).
- Run level 1 is matched by rescue.target (and runlevel1.target is a symbolic link to rescue.target).
- Run level 3 is emulated by multi-user.target (and runlevel3.target is a symbolic link to multi-user.target).
- Run level 5 is emulated by graphical.target (and runlevel5.target is a symbolic link to graphical.target).
- Run level 6 is emulated by reboot.target (and runlevel6.target is a symbolic link to reboot.target).
- Emergency is matched by emergency.target.
systemctl get-default # change target of current session systemctl isolate multi-user.target systemctl isolate graphical.target # set default target systemctl set-default multi-user.target systemctl set-default graphical.target